
Der Michigan Scientific Hochauflösender Radimpulsgeber (WPT) ist ein optischer Encoder, der wird an den Radmuttern befestigt eines Fahrzeugrades. Der WPT wird häufig verwendet, um die Position und Geschwindigkeit eines Fahrzeugs für Anwendungen wie Flottenmanagement und Autonome Fahrzeugverfolgung. Diese Fallstudie demonstriert die Genauigkeit der gemeinsamen Verwendung von zwei Radimpulsgebern und vergleicht die Positions- und Geschwindigkeitsmessungen mit GPS-Daten.
Wie es funktioniert
Das Signal des Encoders wird verwendet, um die Winkelposition und Geschwindigkeit des Rades zu berechnen. Die von zwei WPTs auf beiden Seiten des Fahrzeugs aufgezeichneten Daten können gemittelt werden, um die Mitte zu finden, wodurch die genaueste Darstellung der Entfernung und Geschwindigkeit des Fahrzeugs erhalten wird. Kartierungsfahrzeuge verwenden häufig WPTs, um Unterbrechungen im GPS-Signal auszugleichen, wodurch die Verfolgung der während des Signalverlusts zurückgelegten Entfernung ermöglicht wird. In dieser Studie schnitt die hohe Auflösung der WPT-Daten aufgrund der hohen Abtastrate von 10,000 Hz deutlich besser ab als die des verwendeten GPS-Sensors.
Test-Setup
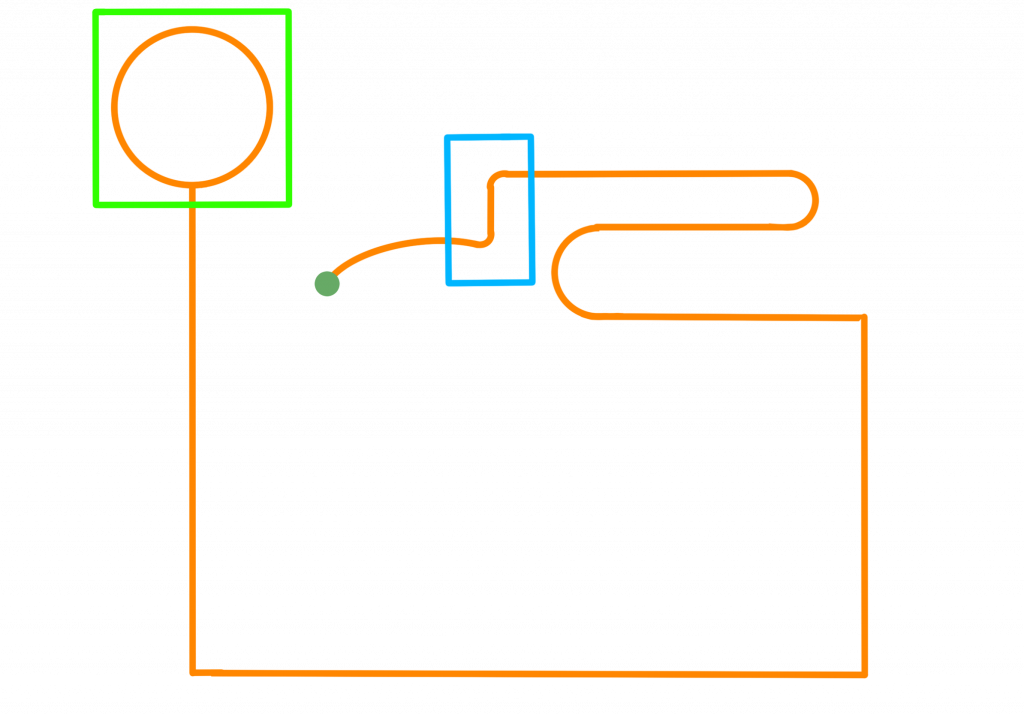
Um die Ergebnisse des Radpulsgebers mit den GPS-Ergebnissen zu vergleichen, wurden zwei WPT-Systeme an einem Fahrzeug angebracht, eines hinten rechts und eines hinten links. Die Aufnehmer wurden an den Hinterrädern montiert, damit die Drehbewegungen der Vorderräder nicht in den Daten kompensiert werden müssen. Ein GPS-Gerät wurde oben auf dem Fahrzeug in der Mitte des Daches über den Hinterrädern angebracht, wo es die genauesten Messwerte lieferte. Die Entfernungen und Geschwindigkeiten des linken und rechten WPT wurden gemittelt, um dem GPS-Signal in der Mitte des Fahrzeugs zu entsprechen. Der unten gezeigte kilometerlange Kurs umfasst zusammen mit einer Breiten- und Längengrad-Darstellung vom GPS einen Kreisverkehr und ein Zickzack-Manöver.
Überblick über die Teststrecke
GPS-Daten von der Teststrecke
Loop
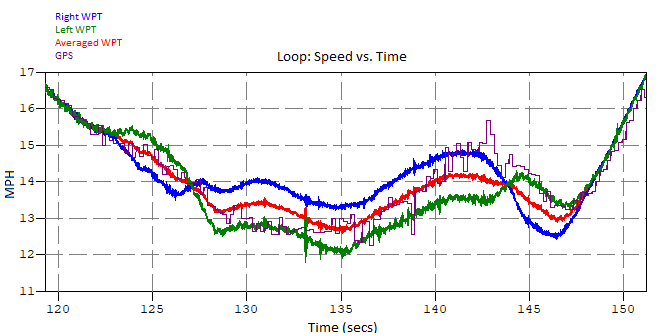
Wenn man den kreisförmigen Teil der Teststrecke (oben grün dargestellt) gegen den Uhrzeigersinn umrundet, würde man erwarten, dass die Geschwindigkeit und der Abstand des rechten Rads viel höher sind als das linke. Wenn man sich die unten gezeigten Daten ansieht, stellt sich heraus, dass dies wahr ist. Die rechten (blau) und linken (grün) Radgeschwindigkeiten werden gemittelt (rot) und stimmen nahezu perfekt mit den GPS-Daten (lila) überein.
Zick-Zack-Pfad
Eine weitere interessante Perspektive bietet der Bereich mit einer schnellen Rechts- und Linkskurve, der innerhalb des blauen Quadrats auf dem Umriss der Teststrecke dargestellt wird. Für das unten stehende Geschwindigkeitsdiagramm wurde das Fahrzeug mit einer schnellen Linkskurve und dann einer sofortigen Rechtskurve manövriert. Die dadurch erzeugte „W“-Form zeigt, dass das linke Rad (lila) langsamer als das rechte (grün) um die Linkskurve fuhr, dann das linke schneller als das rechte um die Rechtskurve. Während die beiden gegenüberliegenden Seiten während des Manövers die Plätze tauschen, bleiben der berechnete Durchschnitt (rot) und die GPS-Daten (blau) in der Mitte dicht beieinander.
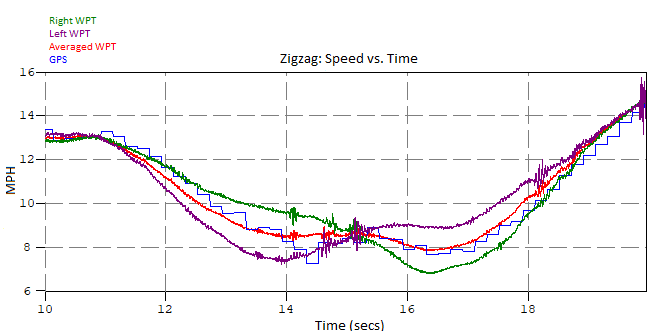
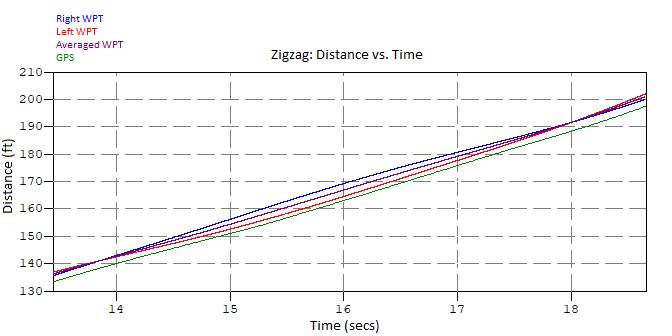
Die Zeit zwischen den beiden Schnittpunkten in der folgenden Grafik ist die Stelle, an der die Links- und Rechtskurven aufgetreten sind. Das rechte Rad (blau) übertrifft das linke Rad (rot) in der zurückgelegten Strecke, da es während der Linkskurve, die etwa 14 Sekunden beginnt und bei etwa 15.5 Sekunden endet, einen größeren Radius zum Umrunden hat. An diesem Punkt ist das rechte Rad weiter gefahren als das linke Rad. Die Rechtskurve beginnt kurz vor 17 Sekunden, und das linke Rad holt das rechte Rad ein, wenn die Kurve nach ungefähr 18 Sekunden endet. Die durchschnittliche (violette) zurückgelegte Strecke bleibt zwischen den beiden zentriert. Da die Steigung der durchschnittlichen Distanz und des GPS gleich ist, zeichnen sie immer noch dieselbe Geschwindigkeit und Distanzänderung auf. Allerdings hinkt das GPS ein paar Meter hinter dem Lenkrad hinterher, daher der leichte Offset in den Daten.
Fehler
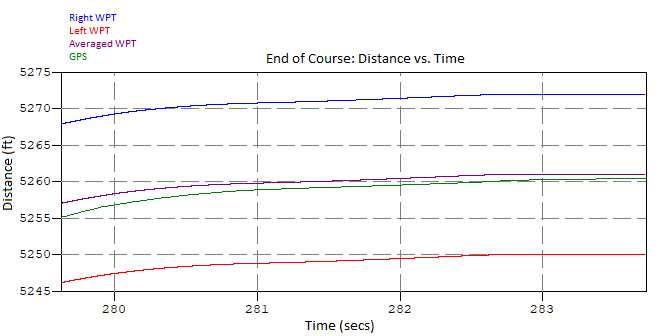
Die letzten Datenpunkte des Tests können die Vorteile der Verwendung von zwei WPTs anstelle von nur einem zeigen. Wenn nur ein WPT verwendet würde, hätten die aufgezeichneten Distanzen einen maximalen Fehler von 0.22 %. Durch die Installation von zwei WPTs und deren Mittelung beträgt der Fehler jedoch nur 0.0115%, was einer Verringerung um den Faktor 19 entspricht. Dies zeigt, dass die Verwendung von zwei Radimpulswandlern dazu beitragen kann, Fehler zu reduzieren, die sich über mehrere Umdrehungen ansammeln können.
Dieser Test ist nur einer von vielen verschiedenen Tests, bei denen Radimpulsaufnehmer verwendet werden. Ein langlebiges und präzises Messsystem ist von Vorteil, um die Position und Geschwindigkeit eines Fahrzeugs in jeder Umgebung genau zu verfolgen. Wenn Sie Ihre Radprüfanwendung besprechen möchten, Wenden Sie sich an einen Vertreter von Michigan Scientific heute.